라인트레이서 만들기..
tracker sensor
void setup()
{
pinMode(8, INPUT);
pinMode(9, INPUT);
pinMode(10, INPUT);
Serial.begin(9600);
}
void loop()
{
int a,b,c;
a= digitalRead(8);
b= digitalRead(9);
c= digitalRead(10);
Serial.print(“a:”);Serial.print(a);
Serial.print(“ b:”);Serial.print(b);
Serial.print(“ c:”);Serial.print(c);
Serial.println(“.”);
delay(1000);
}
encoder
void setup()
{
pinMode(7, INPUT);
Serial.begin(9600);
}
void loop()
{
int a,b,c;
a= digitalRead(7);
Serial.print(“a:”);Serial.print(a);
Serial.println(“.”);
delay(1000);
}
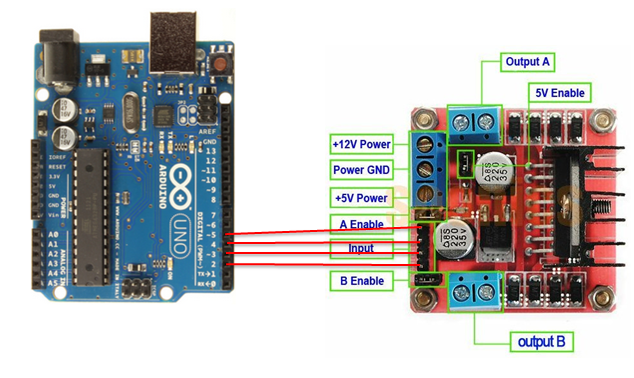
motor control
void setup()
{
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
Serial.begin(9600);
}
void loop()
{
digitalWrite(3, HIGH);
digitalWrite(2, LOW);
digitalWrite(5, HIGH);
digitalWrite(4, LOW);
delay(1000);
}
\