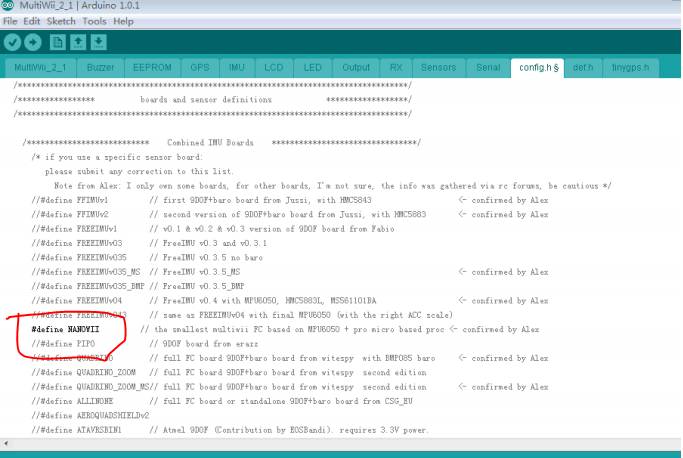
쿼드콥터 source code (Nanowii 사용시)
아래 define을 추가 하면..
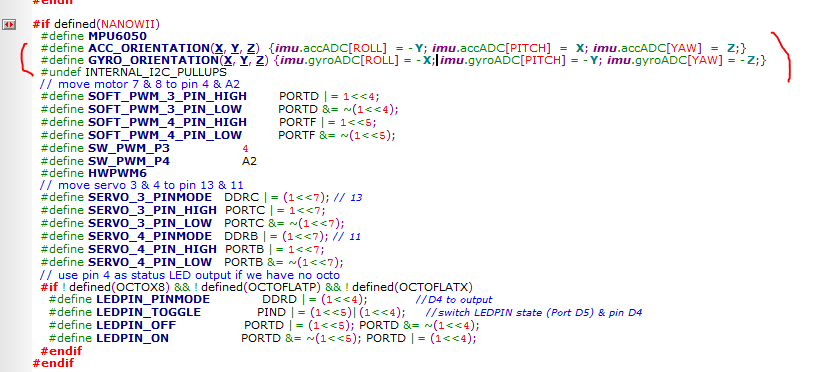
def.h에서 아래 부분이 동작해서 축에 대한 셋팅은 완료 된다. ^^;
config 수정
PPM신호 종류 선택
// #define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,AUX3,AUX4,8,9,10,11 //For Robe/Hitec/Futaba
#define MPU6050_LPF_42HZ
arduino target을 leonardo로 꼭 바꾸고 다운로드 해야함. 안그럼 보드 뻗음 ㅜㅜ
**
ESC calibration 동영상 (simonk 펌웨어 emax esc)
https://youtu.be/E6epG5E8gAQ
**
board 살리기(nanowii SPI 통신 port)
http://gogoprivateryan.blogspot.kr/2014/08/nanowii-arduino-nanowii-mpu6050.html
**
**
turnigy original version connection method——————————
turnigy bind
**
receiver pwm setting
https://www.multicopters.co.uk/tutorials/multiwii-beginners-guide-part-2-transmitter-receiver
**
receiver 종류
http://blog.oscarliang.net/pwm-ppm-sbus-dsm2-dsmx-sumd-difference/
**
pwm 설정시 아래 주석해줘야 함.
//#define SPEKTRUM 1024
————————————————————————————
**
main board 는 상판에 달면 안되고 아래 damper가 좀더 있어야 할것으로 보임.
**
최종 코드
working\_nanowii.zip
**