bluno + hr8833 - motor control
bluno beetle
https://www.dfrobot.com/wiki/index.php/Bluno_Beetle_SKU:DFR0339
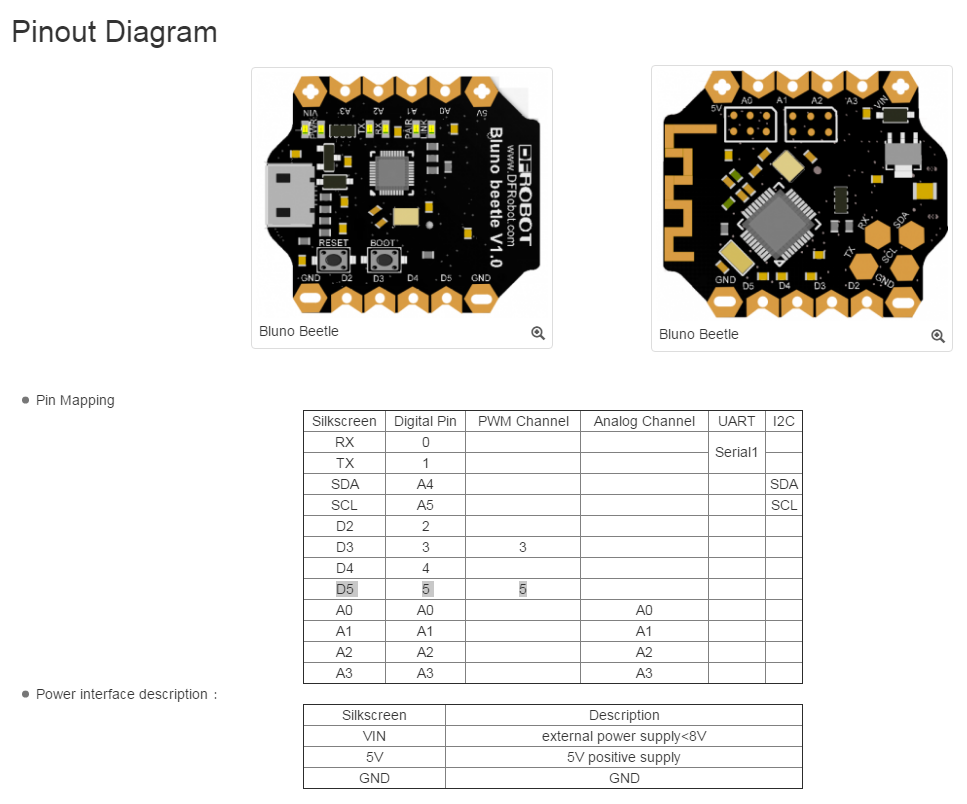
D3, D5 is PWM
D2, D4 is GPIO out
HR8833
https://www.dfrobot.com/wiki/index.php/HR8833_Dual_DC_Motor_Driver_(SKU:DIR0040)
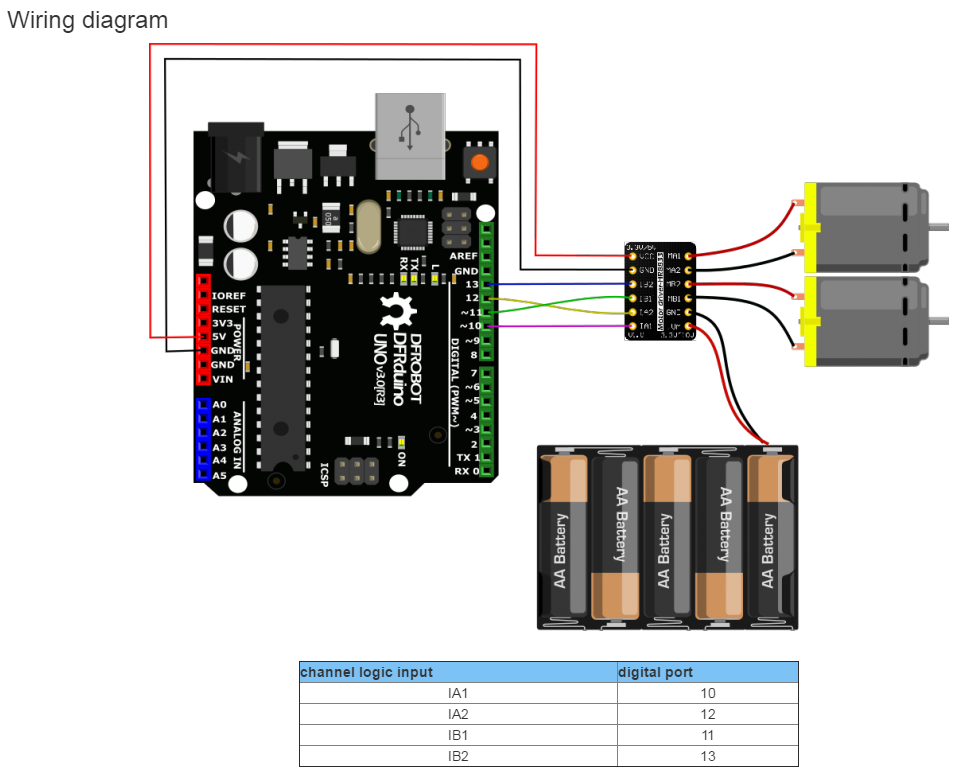
D2 – IB2
D3(PWM) – IB1
D4 – IA2
D5(PWM) – IA1
/*
* @file Motor driver HR8833-Test.ino
* @brief HR8833-Test.ino Motor control program
*
* control motor positive inversion
*
*/
const int IA1=5;
const int IA2=4;
const int IB1=3;
const int IB2=2;
void setup() {
pinMode(IA1, OUTPUT);
pinMode(IA2, OUTPUT);
pinMode(IB1, OUTPUT);
pinMode(IB2, OUTPUT);
}
void loop() {
MA1_Forward(200);//MA 1 road motor is transferred, PWM speed control
MB1_Forward(200);
delay(1000);
//MA2_Backward(200);//MA 2 road motor is transferred, PWM speed control
//delay(1000);
}
void MA1_Forward(int Speed1)
{
analogWrite(IA1,Speed1);
digitalWrite(IA2,LOW);
}
void MA2_Backward(int Speed1)
{
int Speed2=255-Speed1;
analogWrite(IA1,Speed2);
digitalWrite(IA2,HIGH);
}
void MB1_Forward(int Speed1)
{
analogWrite(IB1,Speed1);
digitalWrite(IB2,LOW);
}
void MB2_Backward(int Speed1)
{
int Speed2=255-Speed1;
analogWrite(IB1,Speed2);
digitalWrite(IB2,HIGH);
}
\