[시작하는 드로너….] PPM 방식으로 제어하기
수신기 방식이 PPM일 경우 어떻게 연결하고 셋팅하는지 문의 하시는 독자분이 있어서 살짝 다시 정리 했습니다.
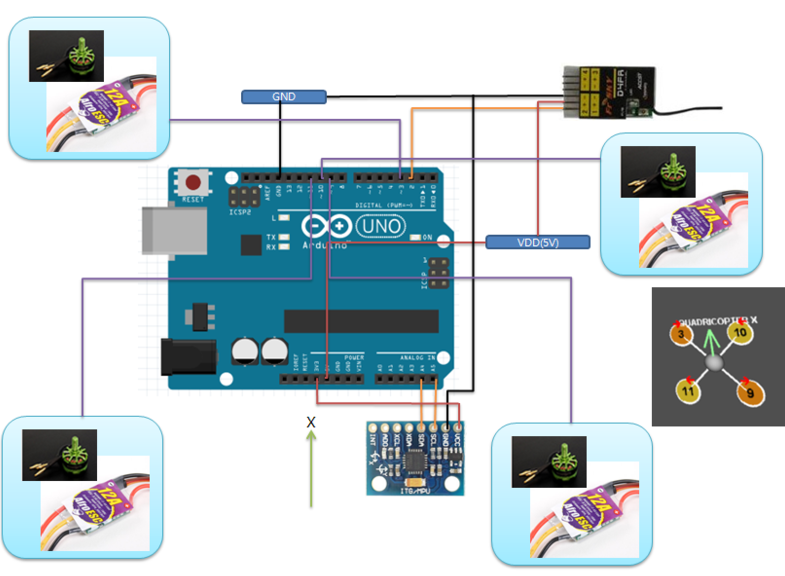
일단 위 그림처럼 PORT 2번에 PPM 신호를 연결합니다.
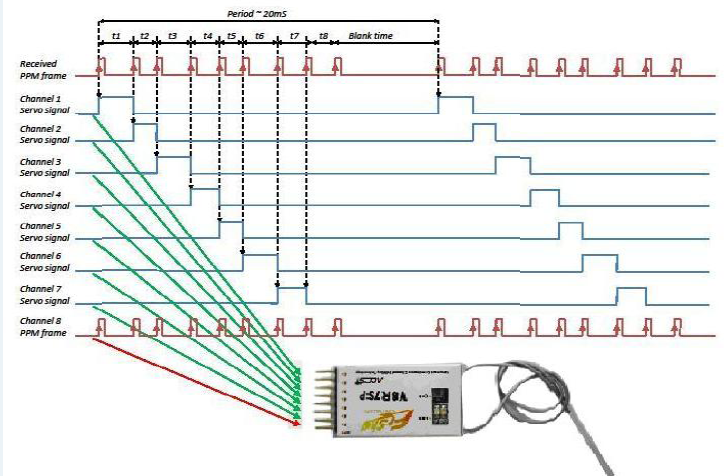
일단 PPM의 경우 아래 그림처럼 한개의 선으로 몇개의 신호를 펄스 주기에 맞춰서 보내는 방식입니다.
아래 그림을 보시면 20ms안에 7개의 신호가 온것을 확인하실수 있을겁니다. ^^;
각설하고.. 그래서 PPM의 경우 PWM의 경우처럼 모든 체널을 연결할 필요는 없고 시그널, VCC, GND만 연결하면 됩니다.
자 그럼 회로 연결은 저렇다고 하고.. SW적으로는 어떻게 수정하면 되는지 보도록 하겠습니다.
수정은 간단합니다.
config.h에서 아래 부분만 주석을 해제하면 되니까요 ^^:
PPM신호 종류 선택
#define SERIAL_SUM_PPM ROLL,PITCH,THROTTLE,YAW,AUX1,AUX2,AUX3,AUX4,8,9,10,11 //For Robe/Hitec/Futaba
자 여기서 한가지 더.. 혹시 송신기에서 보내는 순서가 Roll, Pitch, Throttle, Yaw 순서가 아니라면 위의 define 된 순서를 바꿔주시면 됩니다.
이후.. 확인은 multiwii conf를 연결해서 원하는 데로 조종 신호가 들어오는지 확인하시면 됩니다.
^^;
\